2020.09.15 【関西エレ産業特集】ロボットVRで人間機能拡張
国際電気通信基礎技術研究所(ATR、京都府精華町、けいはんな学研都市)のロボティクス関連の研究開発が進んでいる。
今水寛認知機構研究所所長・東京大学大学院人文社会系研究科教授らの研究グループは、VR(仮想現実)のサイバー空間で脳活動によってアバター(自分の分身)を操作。低下している人間機能の回復、維持や楽器演奏、スポーツ、ドライブ、世界旅行など多種多様な体験を通じて、人間機能を拡張するブレイン・アバター・インターフェイスの研究開発に取り組む。
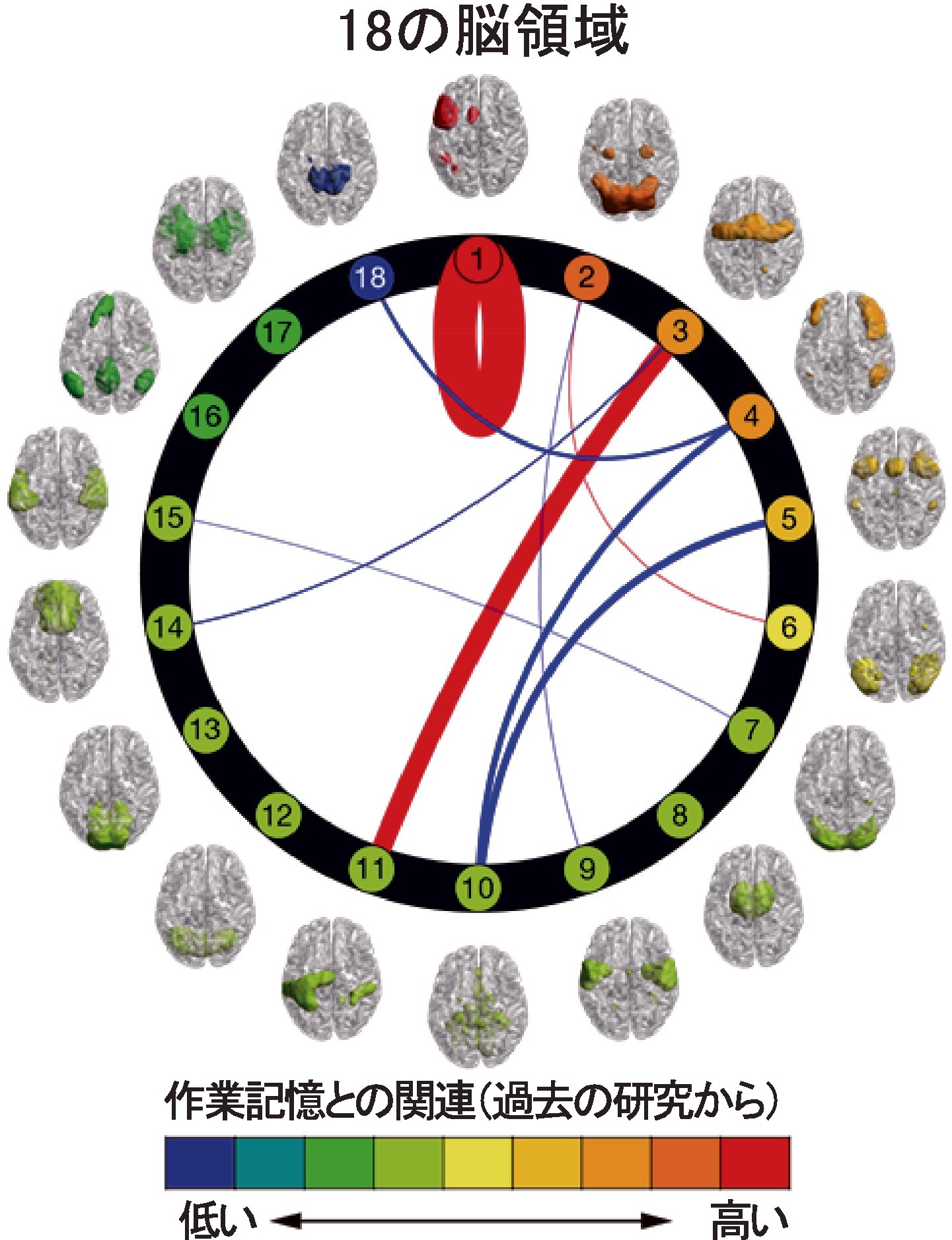
作業記録向上の鍵となる脳のネットワークとして、18の脳の領域と領域と領域をつなぐ九つのつながりの太さが重要であることを特定した。精神疾患や加齢で認知機能が低下するメカニズムの解明や、認知機能を回復・低下を防止する方法の開発に貢献できると言われている。
17年に脳の配線を認知機能に望ましい方向へ変化させるニューロフィードバック学習法を開発。18年には複数の精神疾患における記憶力の低下を共通モデルで予測することに成功した。脳領域の繋がり方パターンから、作業記録能力を定量的に予測するアルゴリズムを開発。予測には16種類の結合が関係していることを示し、疾患に共通する認知機能低下のメカニズム解明を大きく前進させている。
医師、アバター専門家、エンターテインメント企業、情報通信企業、ATRなどと連携して、アバターを操作するヒトの脳の飛躍的な向上および、アバター技術と価値の向上により、人とアバターの相互向上を狙い、5年後以降の社会実装を目指す。
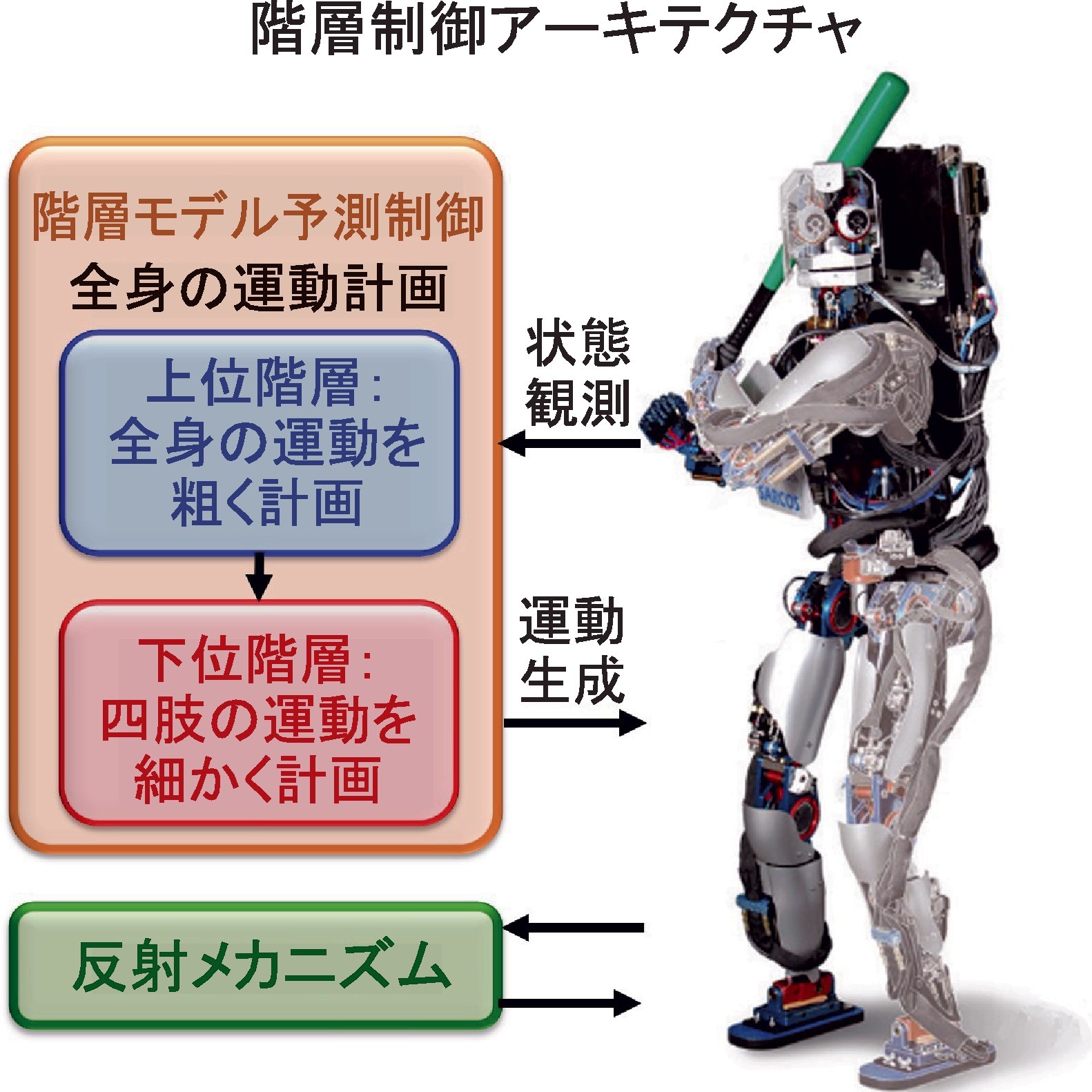
脳情報研究所ブレインロボットインターフェース研究室の森本淳室長らの研究グループは、人型ロボットの全身運動を実時間で計画・生成できる階層制御アーキテクチャを開発した。全身運動を全て時間的に細かく計画する必要はないと判断。速く動く運動は時間的に細かく、遅く動く運動は粗く計画した。
このアーキテクチャを用いたシミュレーション環境で、ローラースケートを履いた人型ロボットの前方宙返り運動や後方宙返り運動など、多様かつ俊敏な運動の生成に成功。さらに同アーキテクチャを実機人型ロボットに用いてスロープ滑降運動の生成実験も開始。傾斜角10度のスロープを滑降するスロープ滑降運動生成で転倒せずに滑降できている。
今後、より多彩な運動生成の実験を行い、人レベルに多様、かつ俊敏な運動を生成する階層モデル予測制御と反射メカニズムからなる階層モデル予測制御の開発を進める。
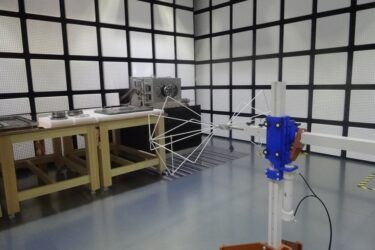
石黒浩特別研究所音環境知能研究グループの石井カルロス寿憲グループリーダーらは、複数の人がいる環境でロボットが快適な対話サービスを提供するために、誰が、いつ発話したかに関連する音声区間の検出や、誰に向けた発話かの手がかりになる顔の向きを推定する音環境知能技術の研究に取り組んでいる。
複数のマイクロホンアレイ、レーザー距離センサーを組み合わせたセンサーネットワークを用いて音源および人の位置を推定。誰がいつ、どこで発話したかを判定する。
現在、音源方向(方位角および仰角)の誤差1度の世界トップクラスの空間的分解能によって、1メートル離れた音源位置を誤差1センチメートル程度で推定可能。音声区間を90%以上の精度で検出し、発話時の顔の向きも20度の平均誤差で推定できることを評価実験で確認している。
音環境知能技術を活用した聴覚支援システムの研究開発や、車内の音響アクティビティの分析、運転者の発話区間検出、運転者の発話意図認識の研究開発にも力を入れる。







![【ものづくりワールド[東京]特集】RX Japan、ものづくり展第38回ものづくりワールド[東京] フィジカルAI展を初開催 東京ビッグサイトに2000社](https://dempa-digital.com/wp-content/uploads/2026/06/260629_07_hidari_doukou-375x250.jpg)