2021.10.29 【5Gがくる】ローカル5G簡単解説<63>5Gによるダイナミック・ケイパビリティー⑥

急に秋の色が濃くなってきた、と思うのは年のせいか。朝晩の寒暖差も大きくなり、さすがに体がついてこない。急激な気温の変化に対応する能力、いわば体のダイナミック・ケイパビリティーが低下しているということだろう。
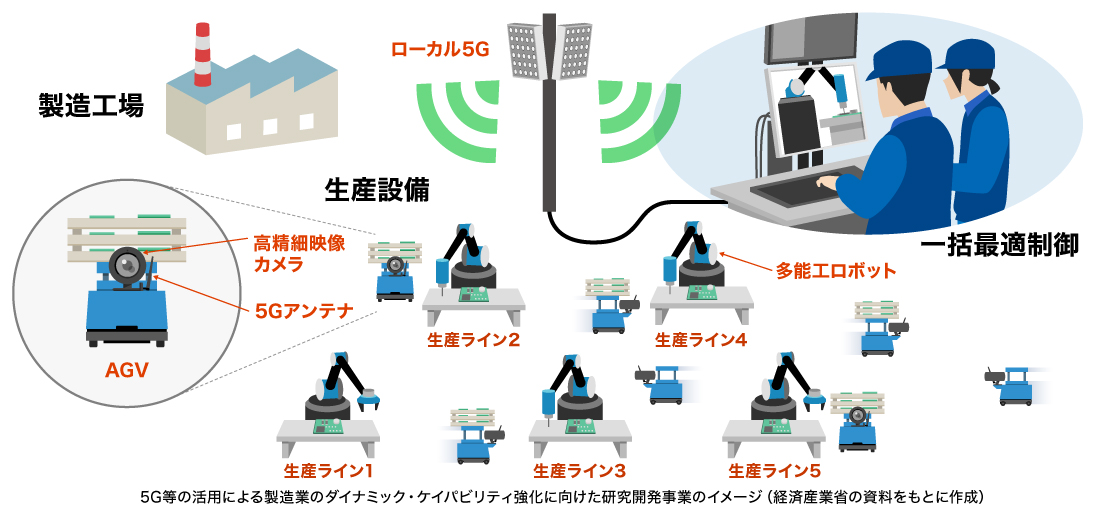
さて、前回に引き続き新エネルギー・産業技術総合開発機構(NEDO)が推進する「5G等の活用による製造業のダイナミック・ケイパビリティ強化に向けた研究開発事業」について、製造工場特有の通信ネットワーク環境の視点から私見を交えて考察したい。
同事業内容を見ると「5G等無線技術の活用により、生産設備等の遠隔での〝一括最適制御〟を通じた、加工順の組換えや個々の生産設備の動作の変更等、柔軟・迅速な組換えや制御が可能な生産ラインを実現する」とある。
一括最適制御とは
ここでよく分からないのが〝一括最適制御〟だ。一体どういう意味なのか? 同資料の記載内容を引用して時系列で整理すると、このようになる。
①工場の全ての〝生産設備〟の稼働状況をリアルタイムに把握・分析する。
②工場全体としての最適な〝生産設備〟の稼働方法を割り出す。
③最適な稼働方法に基づき〝生産設備〟へ制御指示する。
まず①~③に登場する〝生産設備〟とは具体的に何を指しているのか見ていこう。当然、ダイナミック・ケイパビリティーに欠かせない「セル生産方式」(一人屋台生産方式)を前提としたものに違いない。
連載58、59回で解説したように、セル状に散在する生産ラインそれぞれに「多能工」を配置し、部品の組み立てから製品の検査まで行う。
そして何台ものAGV(無人搬送車)が各生産ラインを回り、部品を部品倉庫から搬送したり、製品を出荷場へ搬送したりするイメージだ。この多能工を「多能工ロボット」で代替すれば、FA(ファクトリーオートメーション)となる。
〝生産設備〟とは、各々の生産ラインで稼働している多能工ロボットや、工場全体のあちらこちらを走行しているAGVなどを指していることが分かる。そこでこれらの〝一括最適制御〟が必要となるわけだ。
次に、現場のユースケースをイメージしながら、時系列タスク①を具体化してみたい。
AIでデータ分析
ここでは工場の全生産ラインの多能工ロボットや、AGVの稼働状況を工場内に設置されたセンサーなどのIoTの仕組みによって収集したデータからリアルタイムに把握して、人工知能(AI)によってデータを分析する。
例えば、遠隔から無軌道型AGVのリアルタイム制御を行う場合には、AGVに搭載されたカメラによる高精細映像データを「一括最適制御室(仮称)」へ送信し、作業者はそれを見ながらAGVを遠隔制御するといったイメージになる。
この場合、通信は0.5~1秒程度の低遅延が求められる。ローカル5Gの超高速(eMBB)なら十分可能だろう。(つづく)
〈筆者=モバイルコンピューティング推進コンソーシアム上席顧問。グローバルベンチャー協会理事。国士舘大学非常勤講師・竹井俊文氏〉