2023.04.13 虫のような軟らかいロボット、電通大ら開発 電子回路など微細環境での作業の応用期待
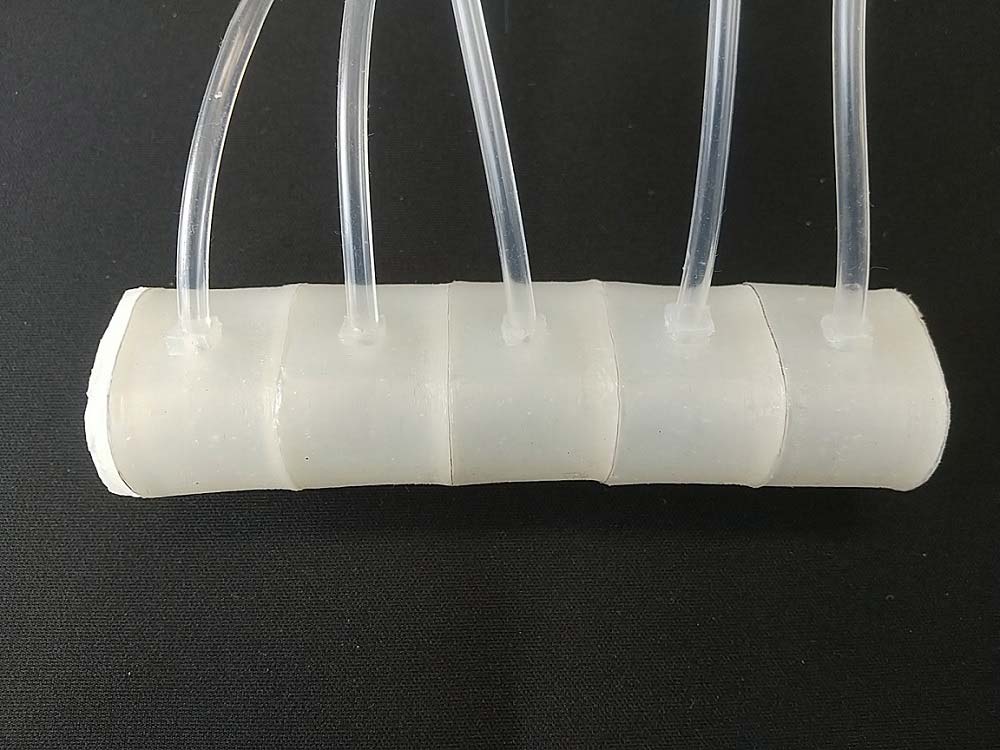
ハエの幼虫のぜん動運動を再現できるソフトロボット
電気通信大学と東京大学の共同チームは今月、幼虫のぜん動運動が可能なソフトロボットを発表した。
金属やプラスチックなどの固い素材で作られる通常のロボットと違い、シリコンなどしなやかな素材でできたソフトロボットは柔軟な動きができる。
開発したロボットは頭から尾にかけて5個の体節で構成される。全長は約10センチメートル。重さはわずか約20グラムだが、内部にはマイコンを内蔵し、精密な機構を備える。
ロボットはバルブを介して真空ポンプに接続。パルスのオンオフでバルブの弁を制御する。
圧力を検知するダイアフラム(極薄膜)式の真空ポンプで体節内を減圧したり、大気圧に戻したりすることでハエの幼虫の動きを再現できる。
ソフトロボットは動きの自由度が高い反面、その制御は難しくなる。
開発に関わった電気通信大学の高坂洋史准教授は「動物は進化の過程で動きの制御を洗練させ、環境に適応したある意味で最適解を実現している」と指摘。「この動物が獲得した解を明らかにして応用することで、ソフトロボットの効率的な制御に生かせる」と期待する。
柔軟さを生かし複雑な環境にも適応して活動できるのがソフトロボットの特長だ。
産業分野では、曲がりくねったり、断面の形状が複雑に変化する管の中などで、壁面を傷つけずに作業することが求められる場面での活用が想定される。
今後、深海や宇宙空間など極限下での人の業務を代替するほか、電子回路などの微小で繊細な環境でも、測定や補修などの作業への応用が期待される。
(14日付電波新聞/電波新聞デジタルで掲載します)