2024.10.24 電通大が開発、植物で動くロボット 成長に伴う物理的変位を活用
植物の成長に伴う変位と力をアクチュエーターとして活用した、移動や物体の操作が可能な植物ロボット
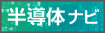
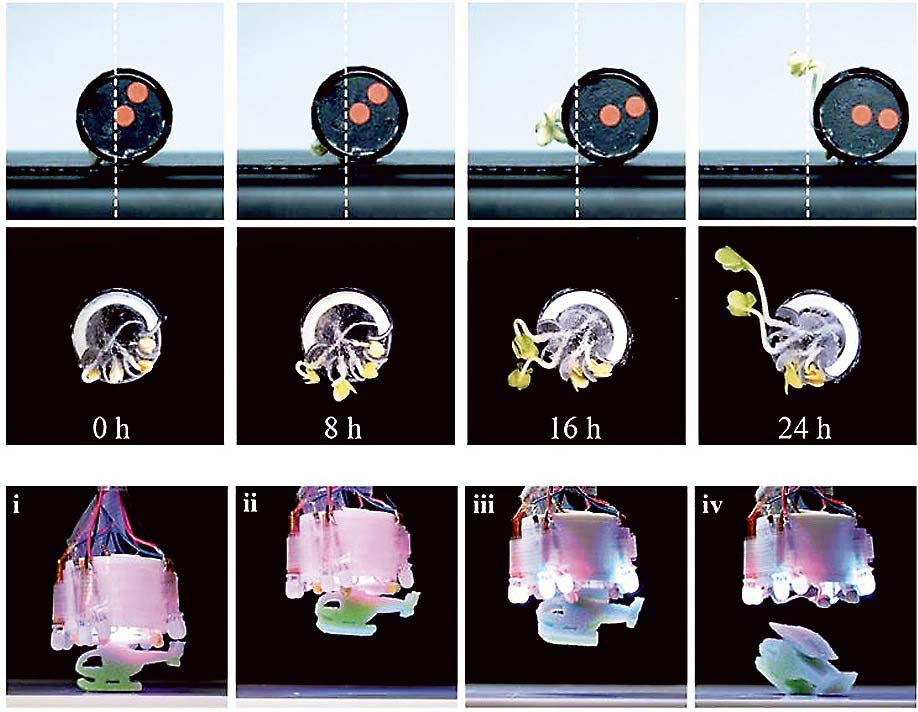
電気通信大学大学院情報理工学研究科機械知能システム学専攻の新竹純准教授らの研究グループは、植物の成長に伴う物理的な変位と力をロボットのアクチュエーターとして活用し、移動や物体の操作が可能な植物ロボットを開発した。
カイワレダイコンをモデル植物として使い、成長により生じる変位と力を解析。これに基づき、移動ロボットとグリッパーの設計、製作、および解析を通した動作実証を行った。この成果は、従来にない新しいタイプの、環境に優しく持続... (つづく)