2021.03.24 【関西エレクトロニクス産業特集】ロボティクス立命館大学情報理工学部、ロボティクス研究で成果
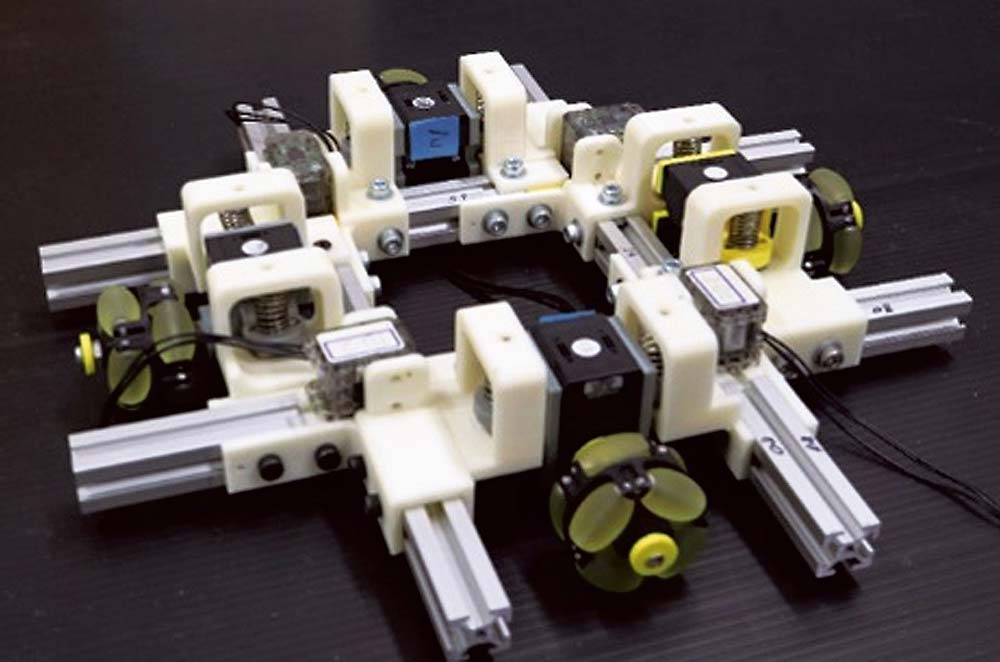
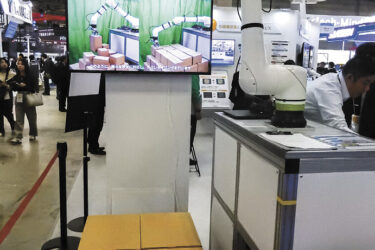
新機構を採用したMoMo Ver5.1
立命館大学情報理工学部がロボティクス研究で成果を出している。
情報理工学部の李周浩教授の研究グループは、空間再構成を実現する独自の移動モジュールロボット「MoMo(モモ=Mobile Module)」を用い、パネルをぶら下げて部屋のレイアウト変更や、トレーなどでモノを運んだり、照明を搭載して人の歩行に合わせて移動し照明を当て転倒を防止する。さらに、壁を用いたエスカレータといった可能性を研究している。
壁に突起を等間隔に配置し、MoMoに取り付けた井形のレールが突起物と結合しながら前後左右に移動する機構を採用。全方向移動車輪のオムニホイール4本、8個のアクチュエータを用いた全長345×345×55ミリメートルの最新MoMo Ver5.1で13.50センチメートル/秒の速さで素早く正確に移動できる。荷重実験では天井面で1キログラム、壁面の横移動で2キログラムまで速度を落とさずにモノを運べることを確認している。
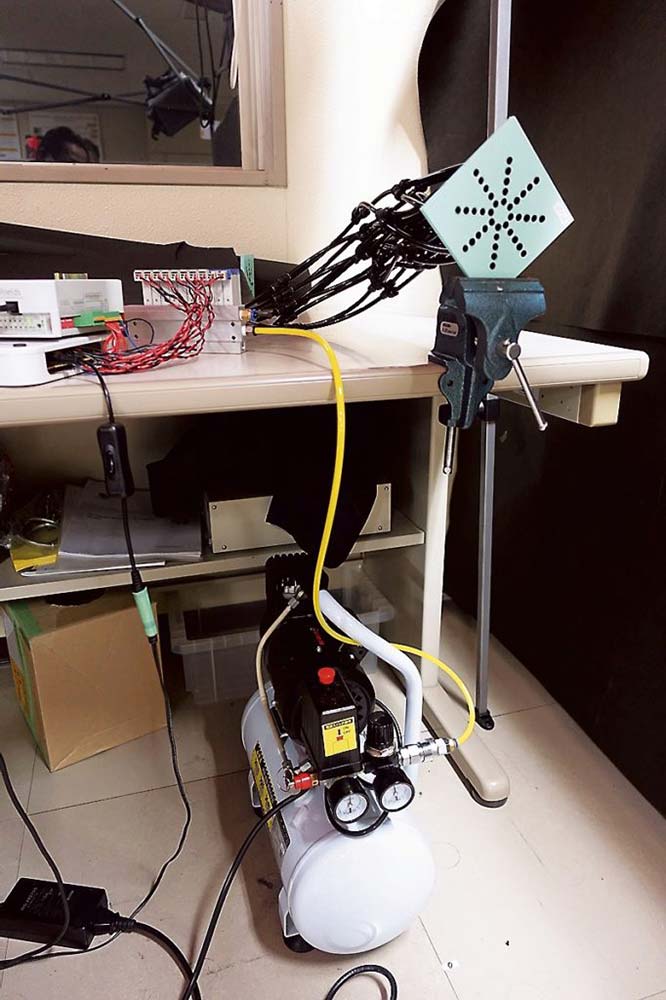
同学部実世界情報コース メディアエクスペリエンスデザイン研究室の野間春生教授らは、名城大学理工学部の柳田康幸教授とともに、10センチメートル角の板面に複数設けた小形の空気射出孔をグルーピング。穴から射出する空気の圧力とタイミングを個別制御することで、穴から生成される渦輪のパラメータを独自に制御でき、安定した渦輪の射出や速度・大きさの異なる多様な渦輪の射出、さらに香りの切り替えも容易になることを実証した。
VR(仮想現実)向けの個人用香り提示をはじめ、自動車運転へ注意喚起する香り提示、映画館といったエンターテインメント施設での香り提示、医薬品の空間デリバリなどに応用できるとみている。
村尾和哉准教授らの研究グループは、脈拍センサーを用いて身体の圧迫による血流変化をセンシングすることで、簡易なコマンド入力を可能とするウエアラブルデバイス用の入力インターフェイスを研究。脈拍計測、ピーク検出、圧迫状態検出、コマンド決定の四つの処理手法で、身体を圧迫するパターンの組み合わせによってコマンドを決定する4種類の入力方式の精度と入力に要した時間を評価する。
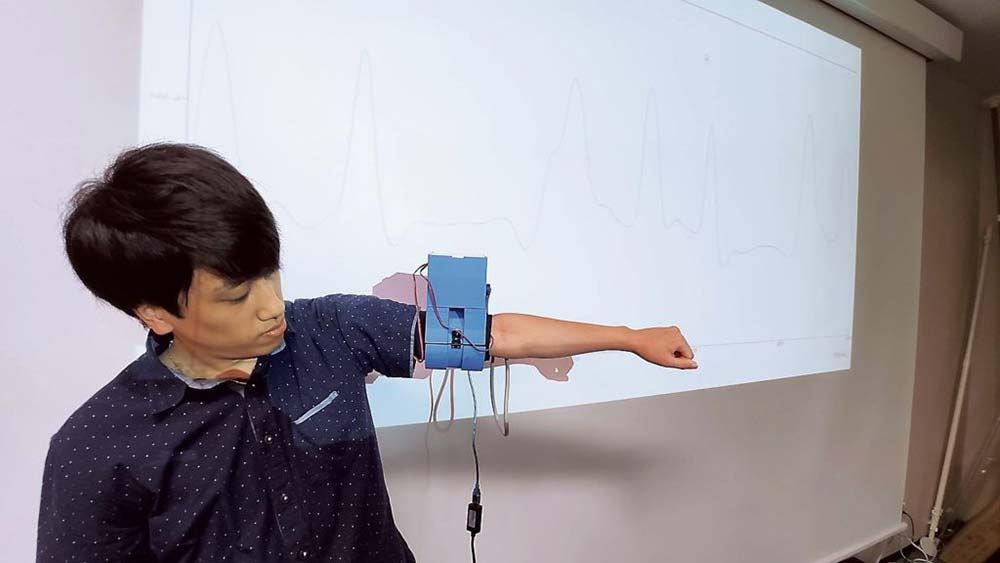
その結果、短い圧迫を複数回行う方式より長い圧迫を一度行う方式の方が入力に要する時間が短く正確で、ユーザー負担が軽いことを確認した。
スマートウオッチに搭載されている脈波センサーを用い、上腕の圧迫による血流変化をセンシングすることで、スマートウオッチに対して簡易なコマンドを入力できるウエアラブルデバイス入力インターフェイスとして簡易的なメッセージの送信だけでなく、再生中の音楽の一時停止や次の曲への移行、本のページめくりなどの操作に使える可能性があると期待している。