2021.11.05 【5Gがくる】ローカル5G簡単解説<64>5Gによるダイナミック・ケイパビリティー⑦

「ロボット」と聞けばアメリカのSF作家アイザック・アシモフの「ロボット工学三原則」を思い出す人も少なくないだろう。1950年の著書「われはロボット」の扉に次のように記されている。
▽第一原則:ロボットは人間に危害を加えてはならない。またその危険を看過することによって、人間に危害を及ぼしてはならない。
▽第二原則:ロボットは人間から与えられた命令に服従しなくてはならない。ただし、与えられた命令が第一原則に反する場合はこの限りではない。
▽第三原則:ロボットは前掲の第一原則、第二原則に反するおそれのない限り、自己を守らなければならない。
このロボット工学三原則は「アイ、ロボット」など多くのSF映画に影響を与えているが、それだけではない。「千葉大学ロボット憲章」にも引用されているほか、今、世界中で熱く議論されている人工知能(AI)倫理原則のバイブル的存在にもなっているという。
多能工ロボット
さて、ダイナミック・ケイパビリティーの最終回、「一人屋台生産方式」の新たな主役となる「多能工ロボット」も、このロボット工学三原則にしたがうものになるだろう。
工員やほかのロボットとの接触や工員に危害を与える恐れのある工場環境の変化などを察知するIoTセンサーは、第一原則には欠かせない要件になる。工員からの命令を受けてリアルタイムにデータ分析し、正確かつ遅延なく判断するAIは第二原則を満たす。
そして、データを収集し、超高速で転送し、多能工ロボットとそれらを支援するAGV(無人搬送車)たちを遠隔から超高信頼・低遅延で制御するのが5G無線通信になる。
まさにロボット工学三原則を実現するのは、デジタルトランスフォーメーション(DX、デジタル変革)を実現するデジタル技術であり、IoTやAI、5Gというわけだ。中でも一人屋台生産方式の頭脳となるのがAIになるだろう。
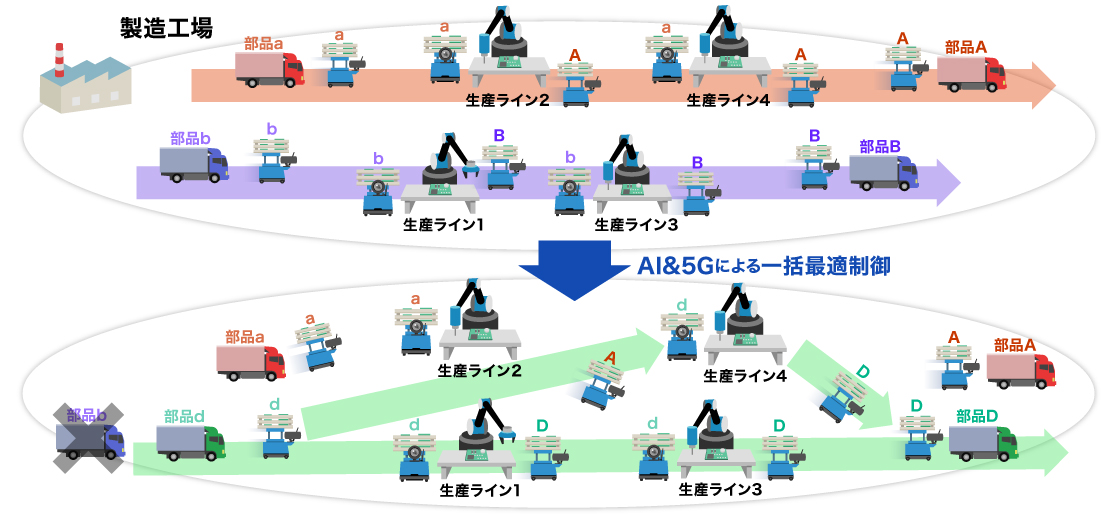
前回、新エネルギー・産業技術総合開発機構(NEDO)が推進する「5G等の活用による製造業のダイナミック・ケイパビリティ強化に向けた研究開発事業」の記載内容を整理した。その中の「工場全体としての最適な多能工ロボットとAGVの稼働方法を割り出す」というのが、AIに課された役割だ。
例えば、コロナ禍や大規模災害などによる受注の激変やサプライチェーンの寸断が発生した場合、変種変量生産に必要な加工手順や組み立て手順の変更が必要で多能工ロボットやAGVの動作変更もしなければならない。それも危険を回避しながら柔軟で迅速な組み換えが求められる。
OSの開発も必要
同事業では、多能工ロボットとAGVの制御アプリケーションとの正確で低遅延な通信ができるプロトコル変換の手法を開発するとともに、OS(基本ソフト)の開発も必要だとしている。
なぜならOT(運用技術)ネットワークとなる産業用イーサネット規格の多くは、ITネットワークの5Gとは異なり、IP(インターネットプロトコル)を前提としているのではなく、イーサネットの上に直接構築されているものが多いからだ。
今後ロボットの利活用が不可欠になってくるとみられるが、工場全体のダイナミック・ケイパビリティーを実現する制御のためには、これらの課題を解決しながら5Gを活用していくことが求められる。(つづく)
〈筆者=モバイルコンピューティング推進コンソーシアム上席顧問。グローバルベンチャー協会理事。国士舘大学非常勤講師・竹井俊文氏〉





![【ものづくりワールド[東京]特集】RX Japan、ものづくり展第38回ものづくりワールド[東京] フィジカルAI展を初開催 東京ビッグサイトに2000社](https://dempa-digital.com/wp-content/uploads/2026/06/260629_07_hidari_doukou-375x250.jpg)