2025.04.03 「ライオン」型モビリティー、大阪・関西万博で公開 4脚でオフロード疾走、川崎重工
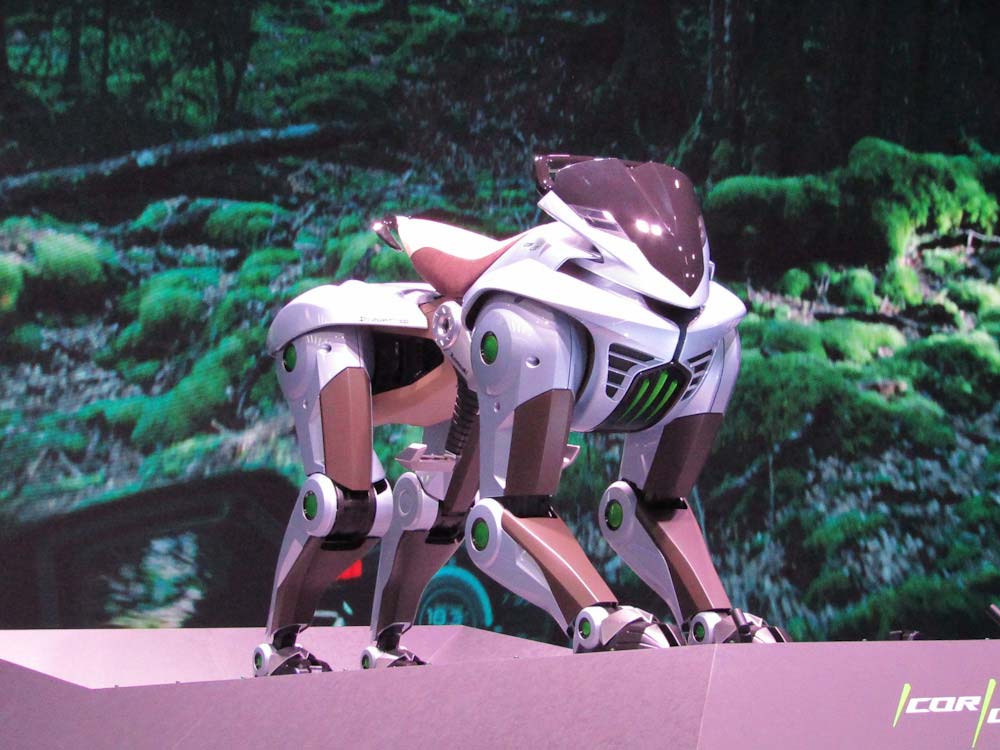
4脚パーソナルモビリティ「CORLEO(コルレオ)」
川崎重工グループは3日、大阪・関西万博(大阪市此花区)の会場で、2050年を想定した4脚のパーソナルモビリティー「CORLEO(コルレオ)」のコンセプトモデルを公開した。ロボット技術とモーターサイクル技術を融合。水素エンジンを搭載しており、ライオンのような外観も特徴だ。
コルレオは、4脚構造による高い走破性と安定性を備え、操る楽しさを追求した新感覚のオフロードモビリティー。モーターサイクルのスイングアーム機構を活用し、後脚が独立して上下に動くことで、移動時の衝撃吸収と視界確保がしやすくなる。操作は乗馬のようにライダーの体重移動で行う。
タイヤでは進入困難な山岳地や水場などでも、初心者が安全に走行できる設計となっている。水素を燃料とし、後脚部に挿入した水素キャニスターにためた水素を使い、前脚部の水素エンジンで発電する仕組み。今回展示されたのは、複数のポーズが可能なコンセプトモデルで、実用化に向けた仕様やスペックは未定。
川崎重工の万博出展総責任者を務める鳥居敬執行役員は、「総合重工企業だからできる4脚の新感覚のモビリティー。2年前から社内で議論し、ここまでできるのに1年半の時間がかかった。実用化は今後検討していく」と語った。