2025.08.27 多関節ロボット姿勢制御の精度向上 富士通、早大、芝浦工大が共同研究
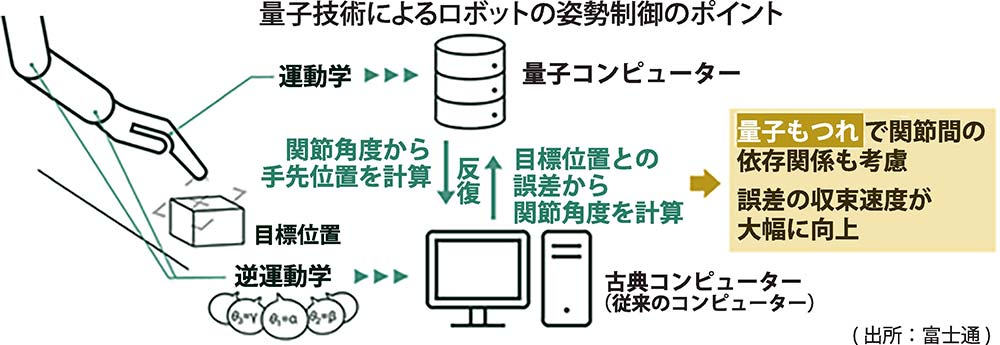
富士通と早稲田大学、芝浦工業大学は、量子コンピューターを用いた新しいロボット姿勢制御手法の開発に成功した。複数の関節を持つロボットの「逆運動学計算」を高精度で効率的に実行する技術で、64量子ビットの実機検証でも有効性が確認された。
逆運動学計算は、ロボットの手先など目標位置に到達するために必要な関節角度を求めるもので、関節の数が多いと計算負荷が大きくなる課題があった。17関節を持つ人体モデルの全身制御は計算困難なため、これま... (つづく)