2025.10.24 日本精工、触覚伝達装置向け減速機開発 小型化と広範囲なトルク制御を両立
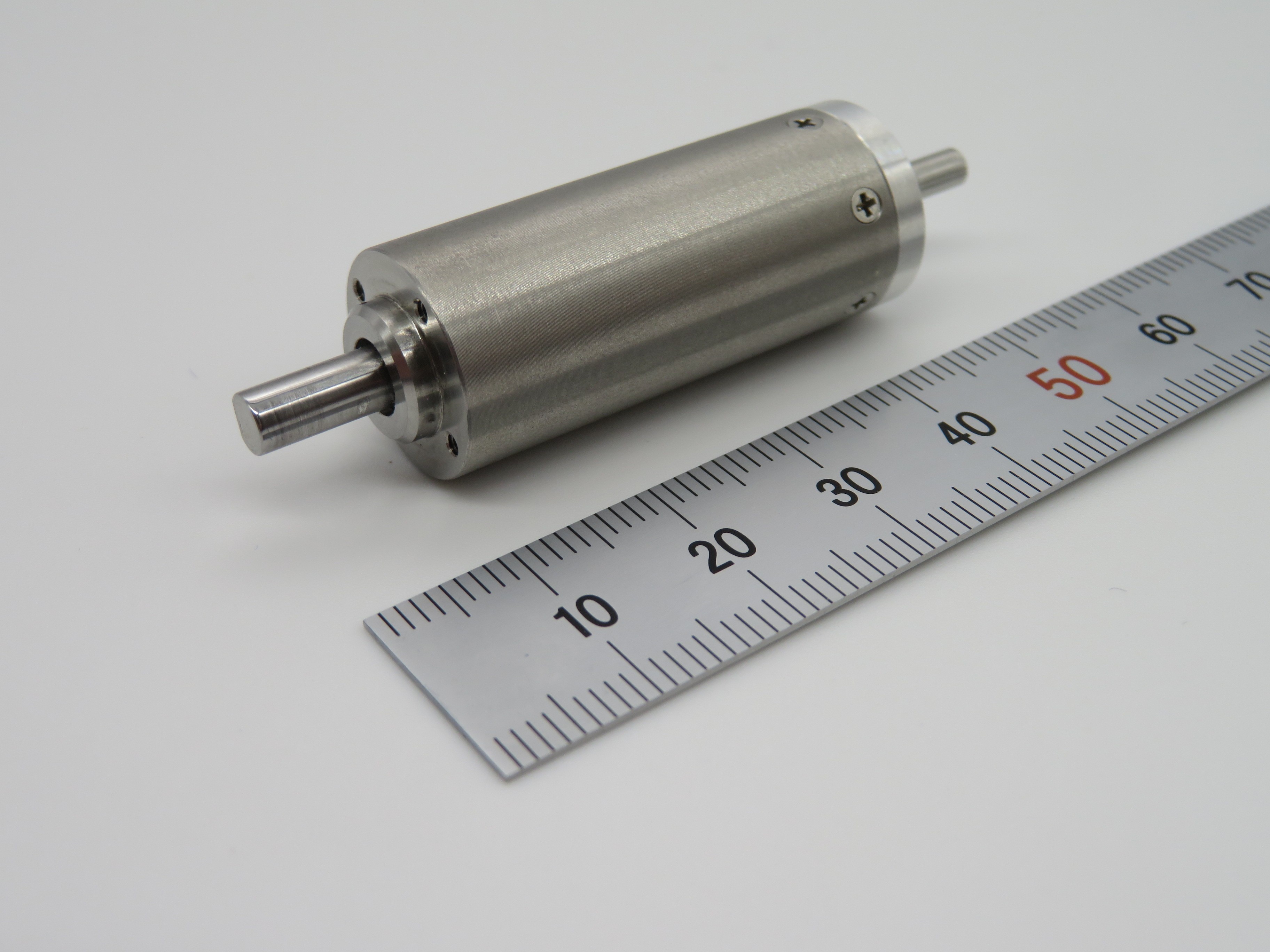
開発したバイラテラルギア
日本精工(NSK)は23日、サービスロボットの触覚伝達装置向け減速機としてバイラテラルギアを開発したと発表した。小型サイズと広範囲のトルク制御機能を両立し、コンパクトな触覚伝達装置開発に貢献する。
触覚伝達装置は、サービスロボットの手の部分などに搭載され、触覚を伝達して遠隔操作や高精度な精度を実現する装置。手のひら程度の小さい装置で人間の繊細な触覚を再現するには小型サイズと広範囲のトルク制御機能を両立した減速機が不可欠だが、従来の減速機ではその両立が課題だった。
同社はこの課題に対し、入力軸と出力軸の双方向(バイラテラル)から高効率で力と位置を伝達する減速機であるバイラテラルギアを、触覚伝達装置向け減速機として開発することで、機能の両立に成功した。開発品は、小型ながら幅広いトルク制御に対応し、手のひらサイズの触覚伝達装置の開発に貢献する。
バイラテラルギアは、出力軸の摩擦トルクが小さく、非常に小さい力でも出力軸を動かして入力軸へ伝達できるため、触覚の伝達が可能。横浜国立大学の特許技術を用いた遊星歯車を中心に構成される。特長は、φ15mmサイズながら大きなトルクで駆動が実現できる点。他社の類似製品(波動歯車)に対して、定格トルクは約3倍、出力軸の摩擦トルクは約20分の1で幅広いトルク制御が可能という。
小型サイズに向けた開発で、遊星歯車と固定歯車・出力歯車のかみ合いで大きな反力が発生するため、遊星歯車を支持する軸受として滑り軸受を使用した場合、軸受の摩擦が増大し動力の伝達効率が悪化するという技術課題があった。この課題に対し、同社が培ってきた小型軸受の開発ノウハウにより解決した。
遊星歯車を支持する軸受に小径の転がり軸受を採用し(玉径0.5mm)、軸受周辺の設計を最低化。これにより、限られたスペースでも反力を受け止め、歯車の回転を支持し、伝達効率を保つことが可能になった。
同社は、12月に東京ビッグサイト(東京都江東区)で開催される「2025国際ロボット展」に出展し、市場ニーズ調査や共同開発先の探索を行う。その後、共同開発先とのコラボレーションにより同開発品を実用化して新しい触覚伝達装置を開発し、市場投入する予定。バイラテラルギアは2026年度にサンプル出荷を開始し、「27年度の商品化を目指す」(同社)。