2025.01.09 【電子部品総合特集】ハイテクフォーカス 京セラ、センシングでAI・ロボットの生産性向上
近年、日本の労働力不足は深刻な社会問題となっている。解決策の一つとして、AI(人工知能)・ロボット技術による生産性向上が挙げられる。AI・ロボットは人間が苦手とする長時間の反復作業を、集中力を切らすことなく遂行できる。同じ動作を繰り返し行う業務を自動化し、人間はより生産性の高い業務に集中することで、労働力不足の解消に寄与できる。
自動化が期待される業務には、製造業のライン作業や仕分け作業、物流業の輸送作業などがある。これらの業務は、部品をつかんで移動させたり、車両を運転するなど、物理的な作業が伴うものが多く存在する。
物理的な作業を行うには、周囲の実環境を正確に捉える必要があり、特に3次元空間(画像+距離)のセンシングは必要不可欠な技術である。
ステレオカメラは、3次元空間を正確に捉えるセンシング技術の一つである。人間の目と同様に、2台のカメラで対象物を同時に撮影すると、距離によって見え方のずれ(視差)が生じる。画像処理を用いて視差を計測することで、正確な距離情報が得られる。
ステレオカメラは、シンプルな構成で高い解像度の3次元情報が得られるため、さまざまなな国内外の企業や研究機関で開発が進められている。京セラ先進技術研究所でも、これまで社内で培ってきた光学技術とAI技術を組み合わせることで、独自のステレオカメラの開発に取り組んでいる。
小型AI測距カメラを開発
京セラ先進技術研究所では、小さなワーク(部品)のばら積みピッキングに向けた、至近距離向けの高精度・小型のAI測距カメラを開発している。AI測距カメラは、金属光沢や半透明ワークのばら積みピッキングを想定している。
ばら積みピッキングとは、把持対象のワークがランダムに積み重ねられた状態から、特定のワークを一つずつ正確に把持し、所定の位置へ配置する技術である。ワークはさまざまな形状、位置、姿勢をとるため、高精度の3次元センシングが必要である。さらに極小ワークを対象とする場合、精度に加えて密度も要求される。
高密度・高精度のステレオカメラを実現するためには、2台のカメラ間の距離(基線長)を長くとり、高倍率なカメラを用いる必要があるが、装置のサイズが大型化し、装置価格も高くなるため、少量多品種の製造ラインへの導入が困難になる。そこで、至近距離のワークを高精度に測距可能な小型のAI測距カメラを開発した。
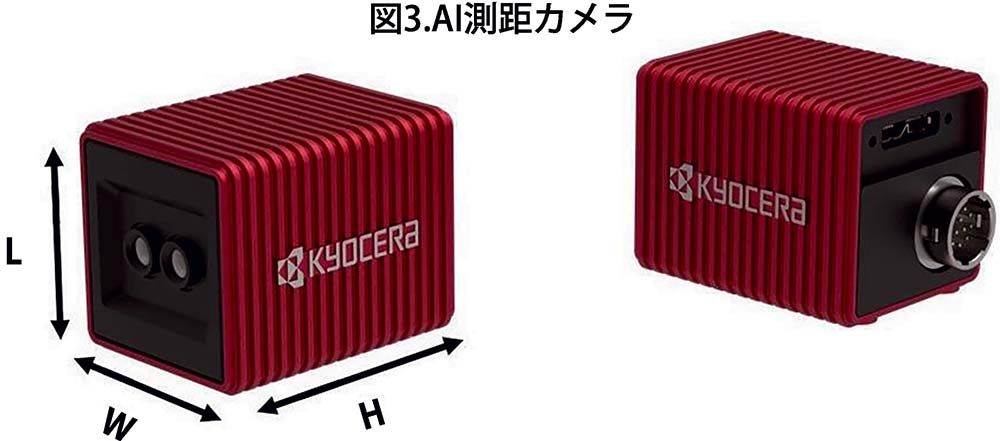
AI測距カメラは単眼カメラと同等の大きさ(29×29×43ミリメートル)、重さ(65グラム)であり、ロボットアームの指先に容易に搭載することが可能である。ロボットアームの手先から至近距離(100ミリメートル)でワークを撮影し、1ミリメートル程度の極小ワークを高密度(XY:0.05ミリメートル)・高精度(誤差:0.1ミリメートル)に測距できる。
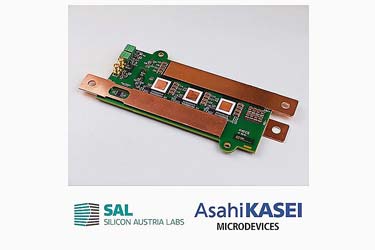
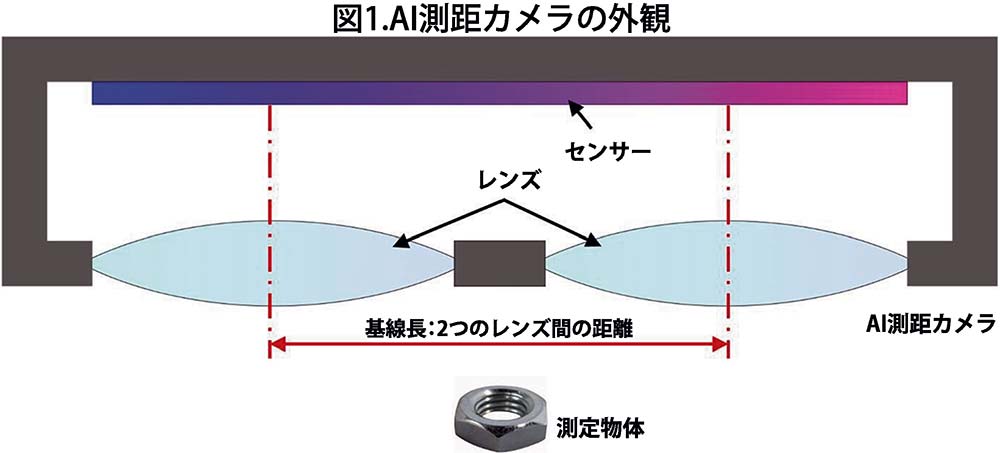
図1にAI測距カメラの外観を示す。本カメラは一つのセンサーに二つのレンズを搭載した独自のステレオカメラ構成を採用することにより、従来のステレオカメラでは不可能であった超至近距離のセンシングを実現した。
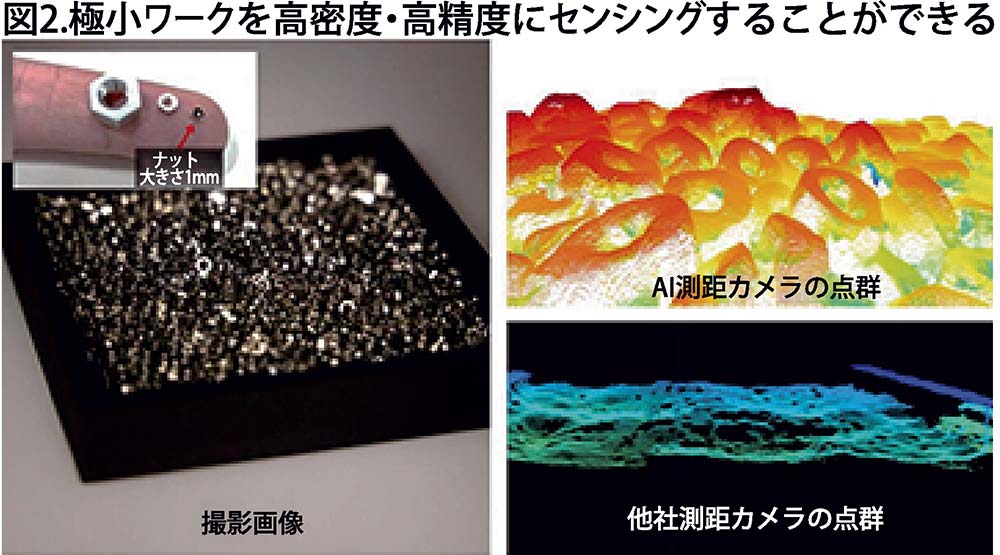
二つのレンズ間の距離を極めて狭めることで(狭基線長)、従来の構成では左右の視点違いにより死角になってしまっていた至近距離での視差を検知できるため、極小ワークを高密度・高精度にセンシングすることができる(図2)。
金属光沢や半透明ワークの高精度なセンシングを実現するために、独自のステレオカメラ校正技術とAIステレオビジョンアルゴリズムを採用した。
ステレオカメラ校正技術とは、レンズ(カメラ)間の幾何学的関係をモデル化する技術を指し、校正精度が高いほど測距精度が向上する。独自のステレオカメラ校正技術は、二つのレンズに対しセンサーが一つであるというハードウエアの拘束条件をモデルに組み込んでいる。ハードウエアの拘束条件があることで、最適化されるパラメーターの自由度を下げ、少ない手順で高い精度の校正を実現した。
また、AIステレオビジョンアルゴリズムを採用することで、金属光沢や半透明ワークを含む多様なワークへの対応を可能にした。金属光沢や半透明ワークは、左右の視差を正しく求めることが難しく、高精度なセンシングが困難であった。これらに対応するため、AIステレオビジョンアルゴリズムの採用が考えられるが、多様なワークへの対応力を獲得するためには、大量の学習データとそれに伴うアノテーション(正解データの作成)コスト、膨大な学習時間が必要であった。
われわれは独自のCGによる学習データの生成技術と、正解データを必要としない事前学習技術を開発し、AIステレオビジョンアルゴリズムの効率的な学習を実現した。これらの技術を適用することで、極小ワークや半透明、金属光沢を含む多様なワークを、至近距離で高精度・高密度に測距できる。
AI・ロボットに新たな目
2023年12月に開催された展示会iREX(International Robot Exhibition)の京セラブースにおいて、極小ワークのばら積みピッキングが可能なAI測距カメラとして、本モジュールを展示した(図3)。極小ワークとして金属光沢を持つM1.2ナットを対象とし、AI測距カメラによって得た3次元センシング結果を用いて、ロボットアームをリアルタイムに制御した。本技術により、AI・ロボットに新たな目を与えることで、さらなる生産性向上を推進し、労働力不足の解消に貢献したいと考えている。京セラ先進技術研究所は、これまで社内で培ってきた光学技術にAIや画像処理技術を掛け合わせることで、付加価値の高いセンシングモジュールの開発を行い、社会課題の解決を目指していく。〈筆者=京セラ〉