2025.11.07 日本精工、ヒューマノイドロボット向けアクチュエーター開発 人間らしい動作の実現支援
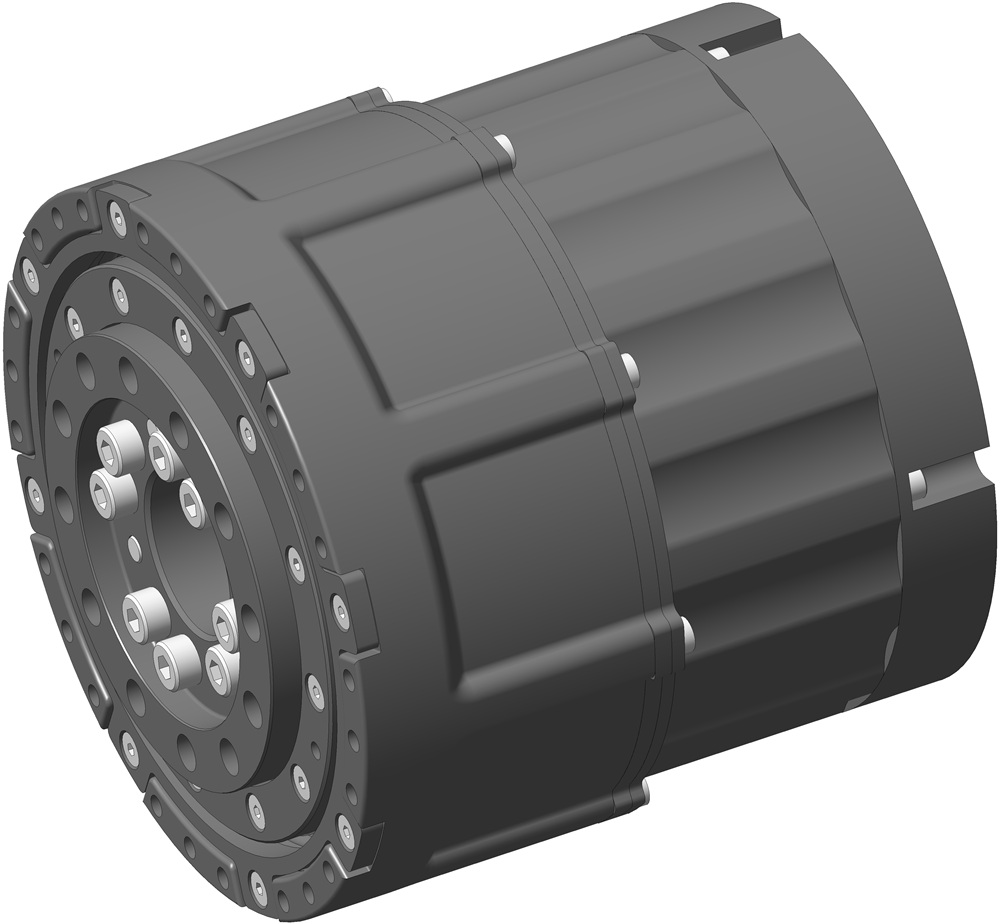
関節部へ適用する「ロータリーアクチュエータ」
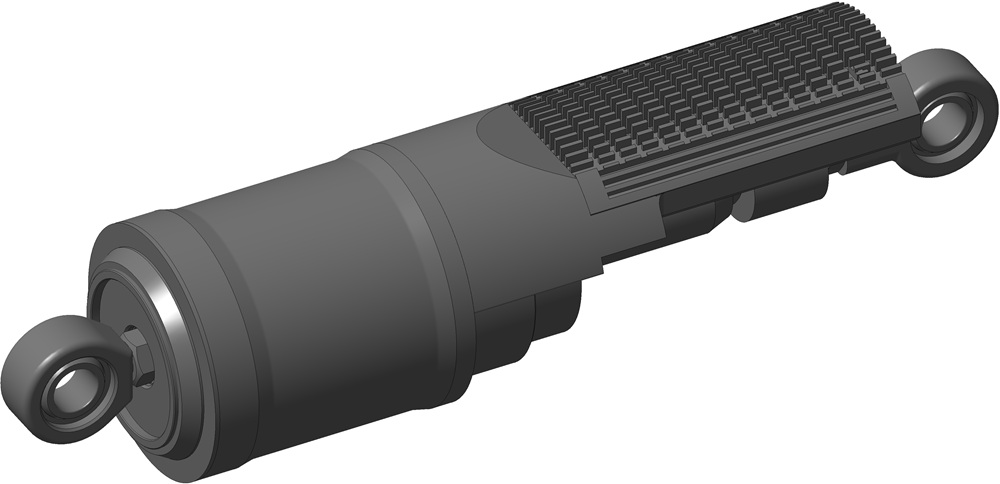 伸縮部向け「リニアアクチュエータ」
伸縮部向け「リニアアクチュエータ」
日本精工は、人間らしい動作が求められる「ヒューマノイドロボット」に適用可能なアクチュエーター(駆動装置)を開発したと発表した。台湾で創業した電子機器メーカーのデルタ電子と協業し、ドライバーを内蔵した「機電一体構造」による小型化を実現。2028年の市場投入を予定している。
開発したのは、肩や肘などの関節部で使う「ロータリーアクチュエータ」と、腕や脚の伸縮部向け「リニアアクチュエータ」。いずれも、ロボットの関節やアクチュエーターの出力軸に外力を加えた際の駆動系の動作性の高さを示す「小型・軽量・高バックドライバビリティ」という特長を持ち、ロボットのしなやかな動きの実現に役立つ。
ロータリーアクチュエータは、回転運動により人間の関節構造と同様の挙動を実現する。高機能の軸受を採用し、小型化と軽量化を達成。ロボットの配線や配管の自由度を高める「中空穴」を確保した。負荷トルクを推定することで、「バックドライバビリティ」を改善するという。
リニアアクチュエータは、直線的な伸縮動作、歩行や物体の押し出しといった場面で使用する。逆作動性に優れた高負荷対応のボールねじを採用することで、「高バックドライバビリティ」を実現。他社市販製品の「インバーテッドローラーねじ」に対して、逆作動効率が30%高まるという。
ヒューマノイドロボットは、身体の部位ごとに必要とされる力が異なるため、アクチュエーターのサイズも使い分けが必要だ。まずは、使用数が多いと見込まれる中型から開発。将来的には、大型と小型も用意し、全身への最適な配置を実現することを目指す。
近年、ヒューマノイドロボットは、労働力不足や高齢化といった社会課題の解決に向けて、製造や物流などの多様な分野での活用が期待され、世界的な市場拡大が見込まれている。このロボットには人間と同様の体格と動作が求められており、産業用ロボットに要求される高精度や高信頼性といった性能要件に加えて、小型・軽量・高バックドライバビリティなアクチュエーターが必要とされている。